NIDAR : NIR-Guided Intrinsic Decomposition for Scalable Scene-Agnostic LiDAR Intensity Reconstruction

Intensity for Any Scenes/Simulators
A universal plug-and-play intensity layer — drop it onto any point cloud simulation pipeline, zero retraining required.
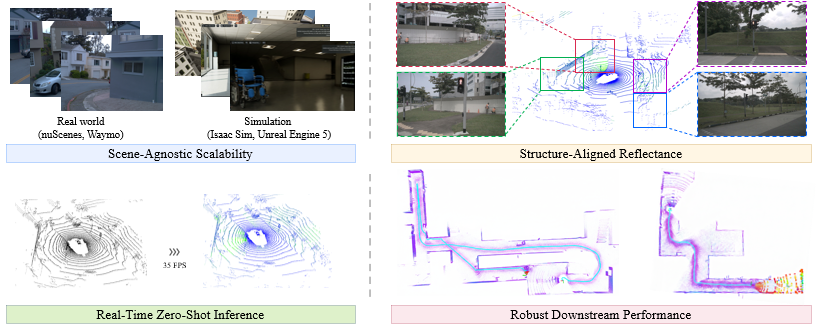
NIDAR is a plug-and-play LiDAR intensity synthesis module that augments arbitrary LiDAR simulators and re-simulation pipelines. It infers physically consistent intensity from low-cost RGB inputs and geometry, requiring no per-scene training/optimization and no intensity ground truth during deployment.
As a crucial signal for perception and state estimation, LiDAR intensity provides complementary reflectance cues beyond geometry. Despite its importance, most existing simulation pipelines either omit intensity altogether or rely on reconstruction-based approaches that require scene-specific real intensity supervision. Such dependence on real groundtruth data not only incurs substantial data acquisition costs but also hinders scalability and limits generalization across scenes, sensors, and simulation platforms.
To address this gap, we propose NIDAR, a general and scene-agnostic intensity synthesis module that augments arbitrary LiDAR simulators and re-simulation pipelines. NIDAR infers physically consistent intensity from low-cost RGB inputs and geometry, requiring no per-scene training/optimization and no intensity ground truth during deployment. We implement NIDAR as a hierarchical UNet+DeepLabV3 intrinsic decomposition network with lightweight distribution calibration, achieving real-time feed-forward inference while avoiding the hours-level scene fitting cost of reconstruction-based baselines. Comprehensive experiments on nuScenes and Waymo verify the effectiveness and cross-scene generalization of NIDAR. We further validate its scalability by integrating it into Isaac Sim, UE5, and generative simulation pipelines. In addition, downstream SLAM evaluations in Isaac Sim demonstrate that NIDAR-generated intensity improves localization accuracy and significantly reduces drift, especially in challenging scenarios. Our approach provides a unified solution that equips existing LiDAR simulation systems with realistic intensity generation capability. To benefit the research community, we will release our codes upon paper acceptance.
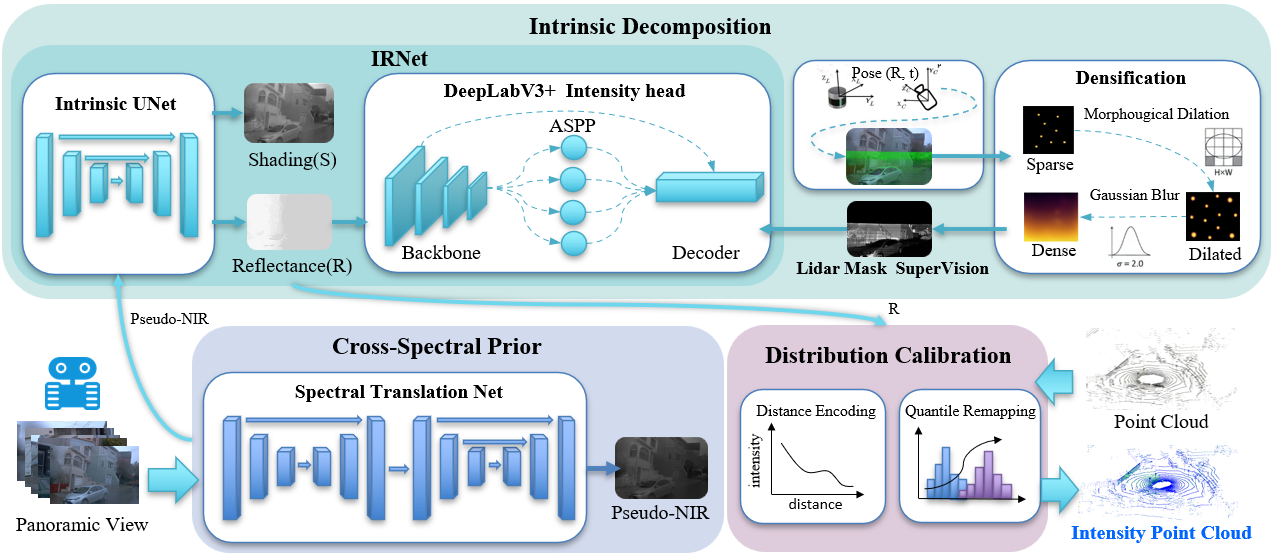
NIDAR pipeline. Cross-spectral pseudo-NIR prior, intrinsic decomposition (reflectance/shading) with mask-aware intensity supervision, and distribution calibration for plug-and-play LiDAR intensity synthesis.
 nuScenes
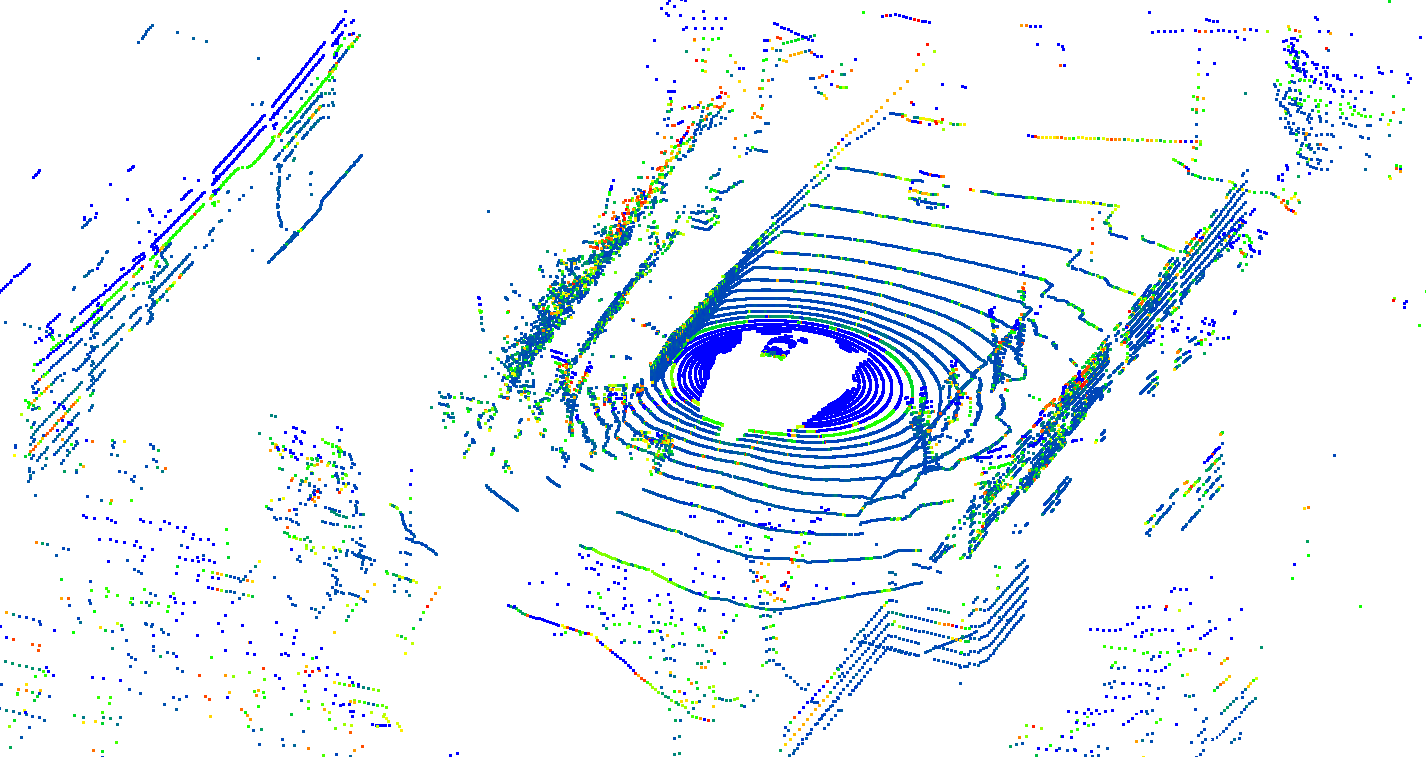
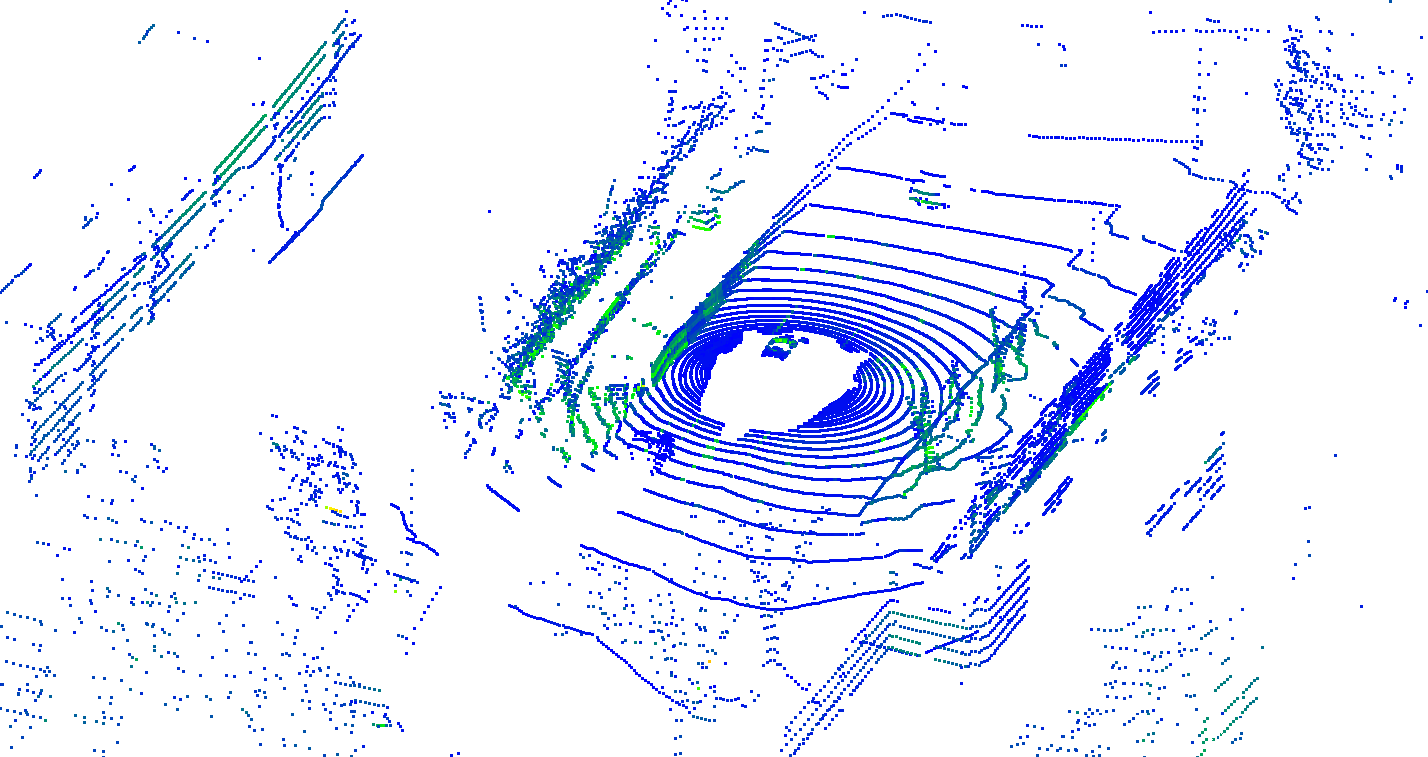
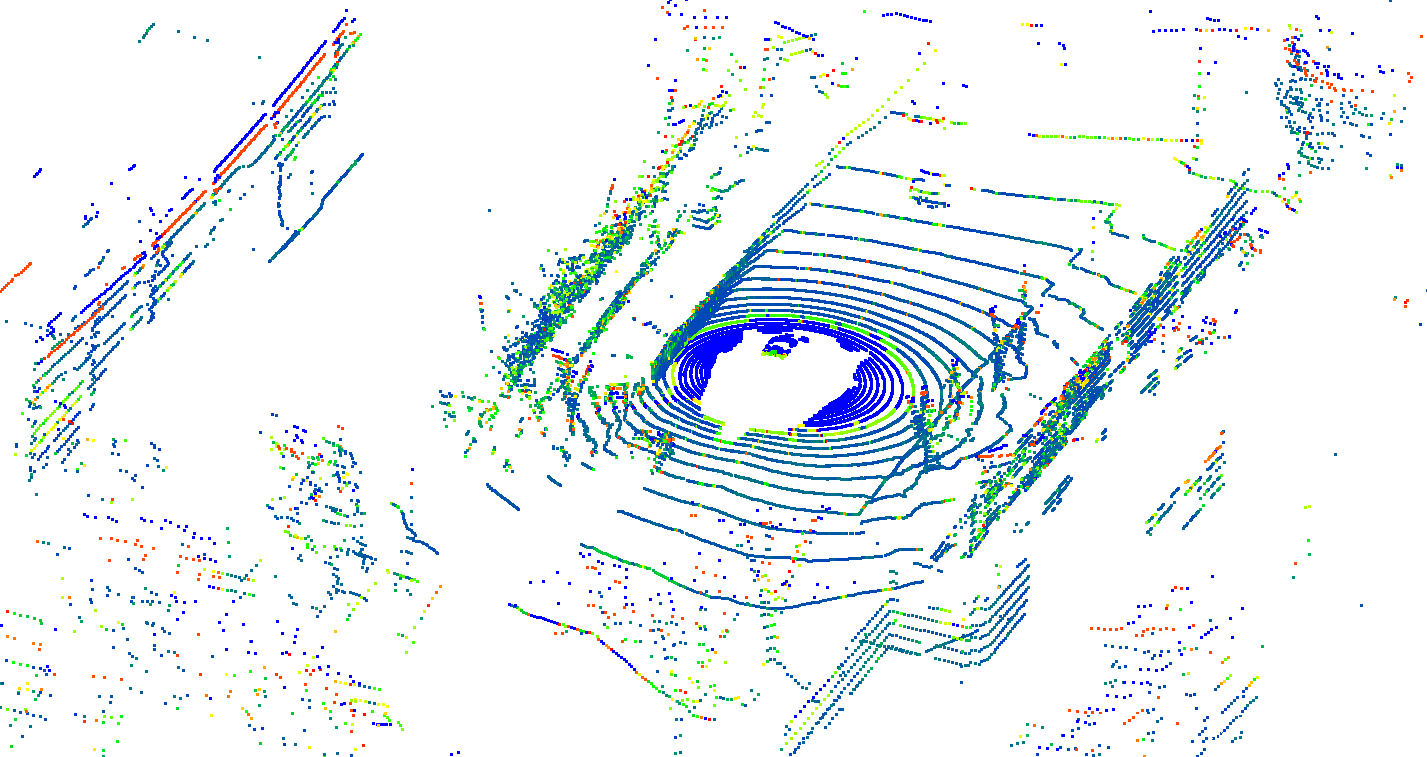
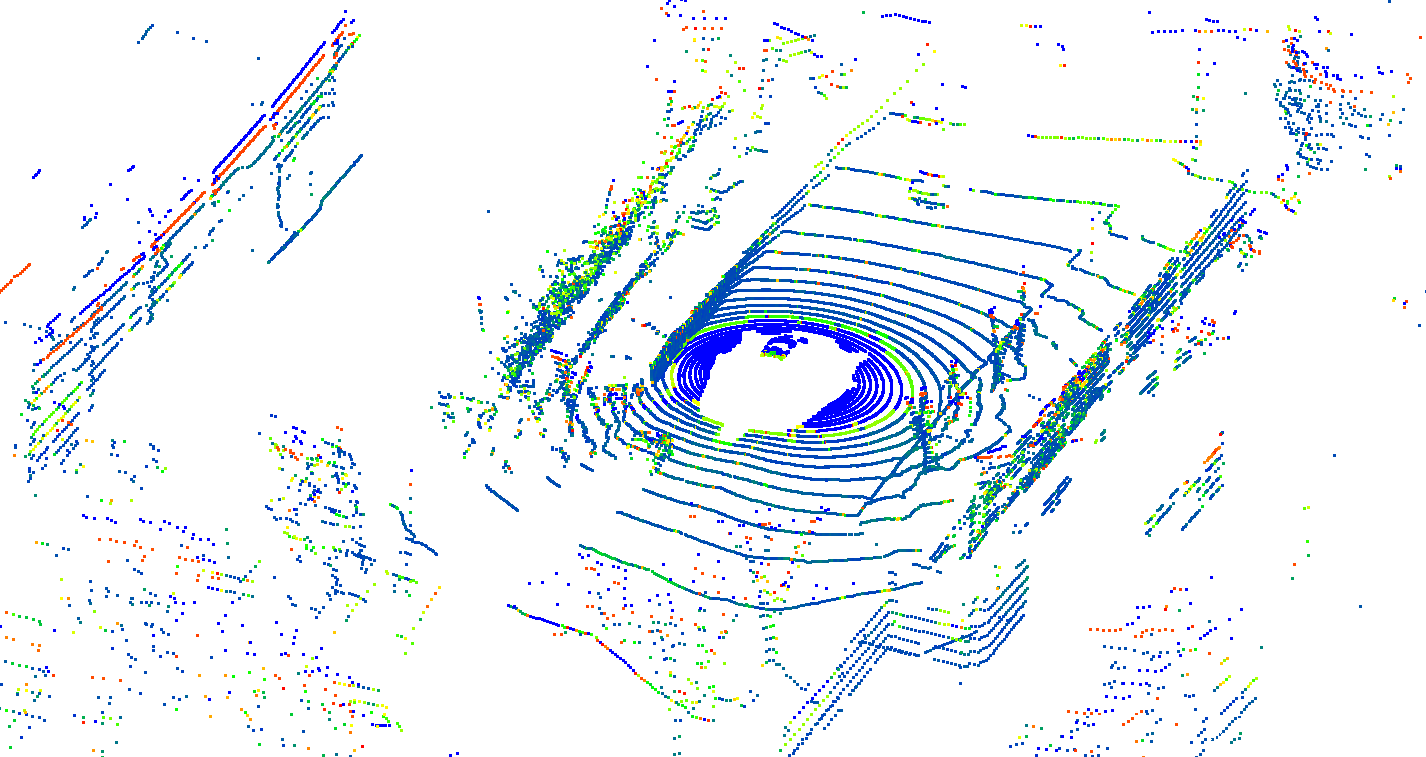
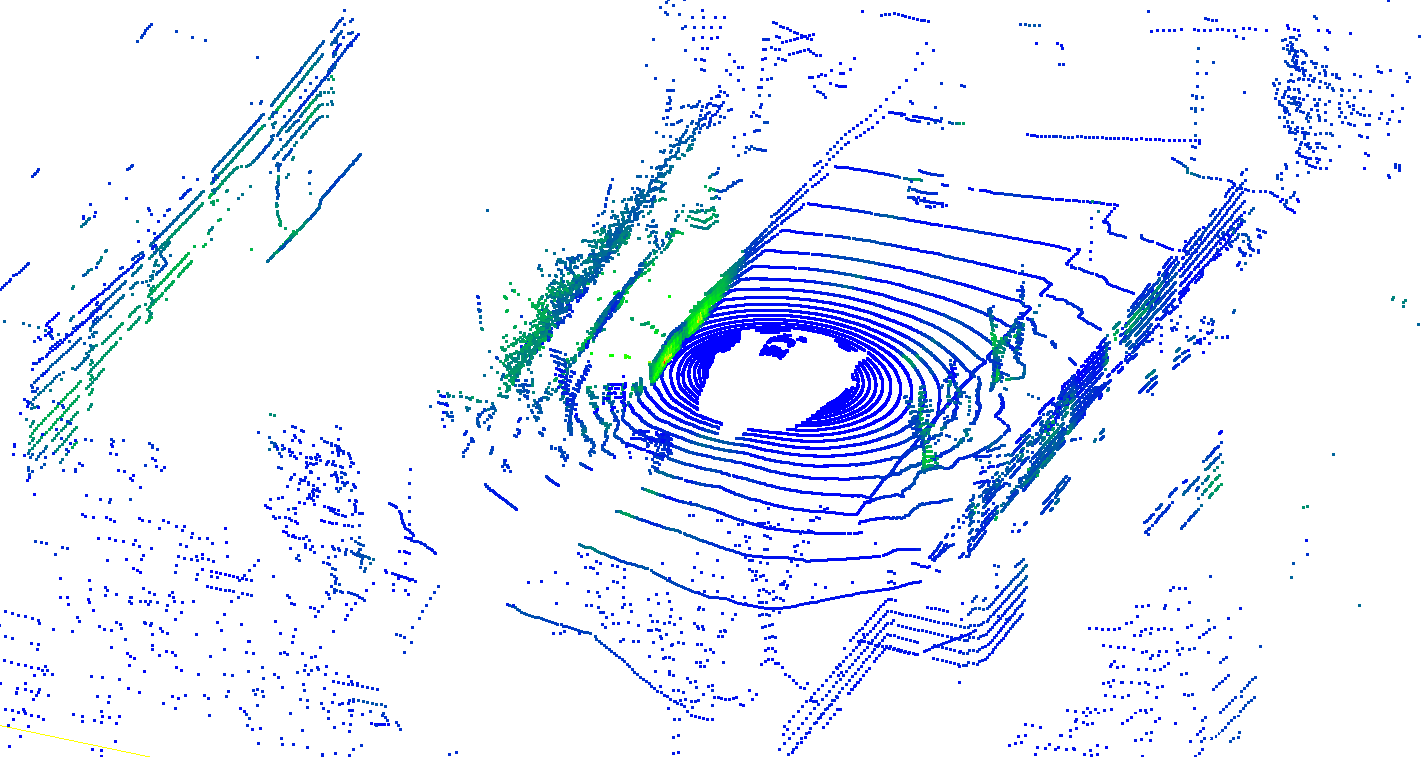
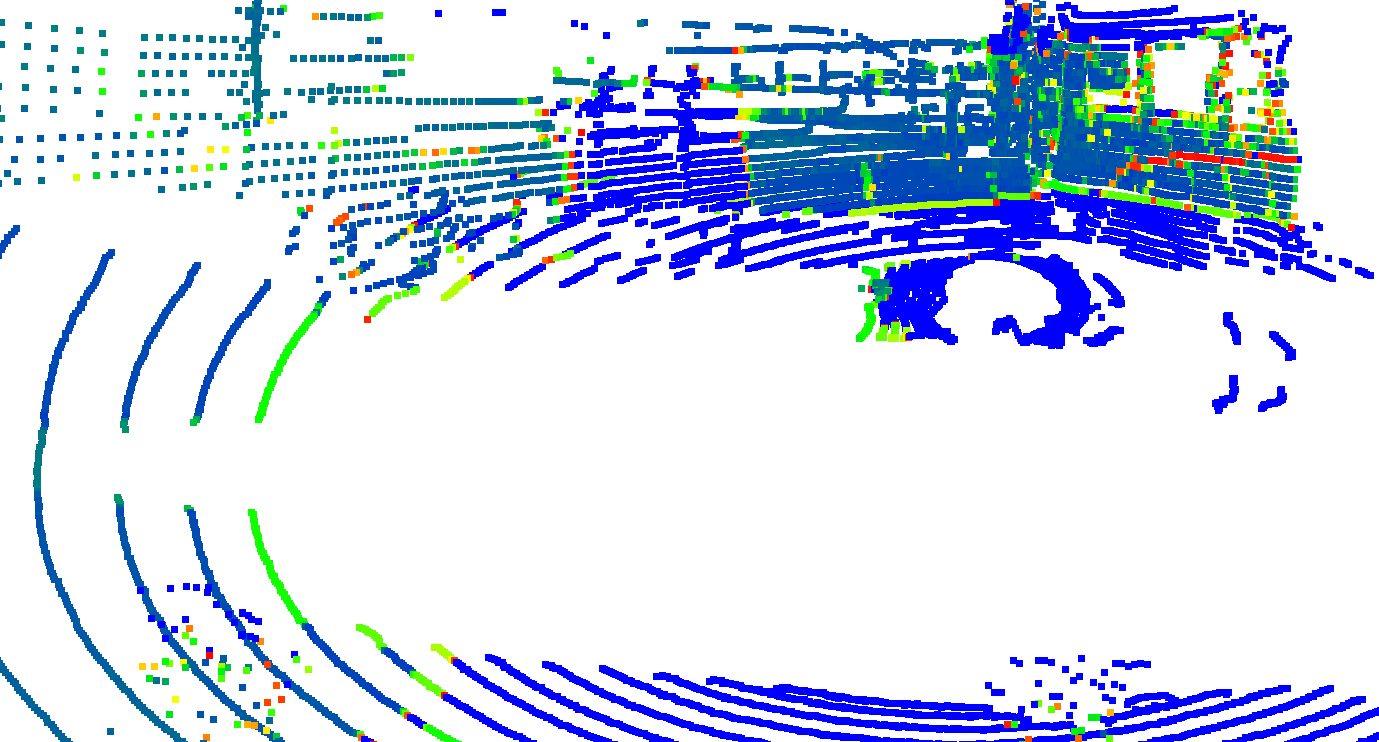
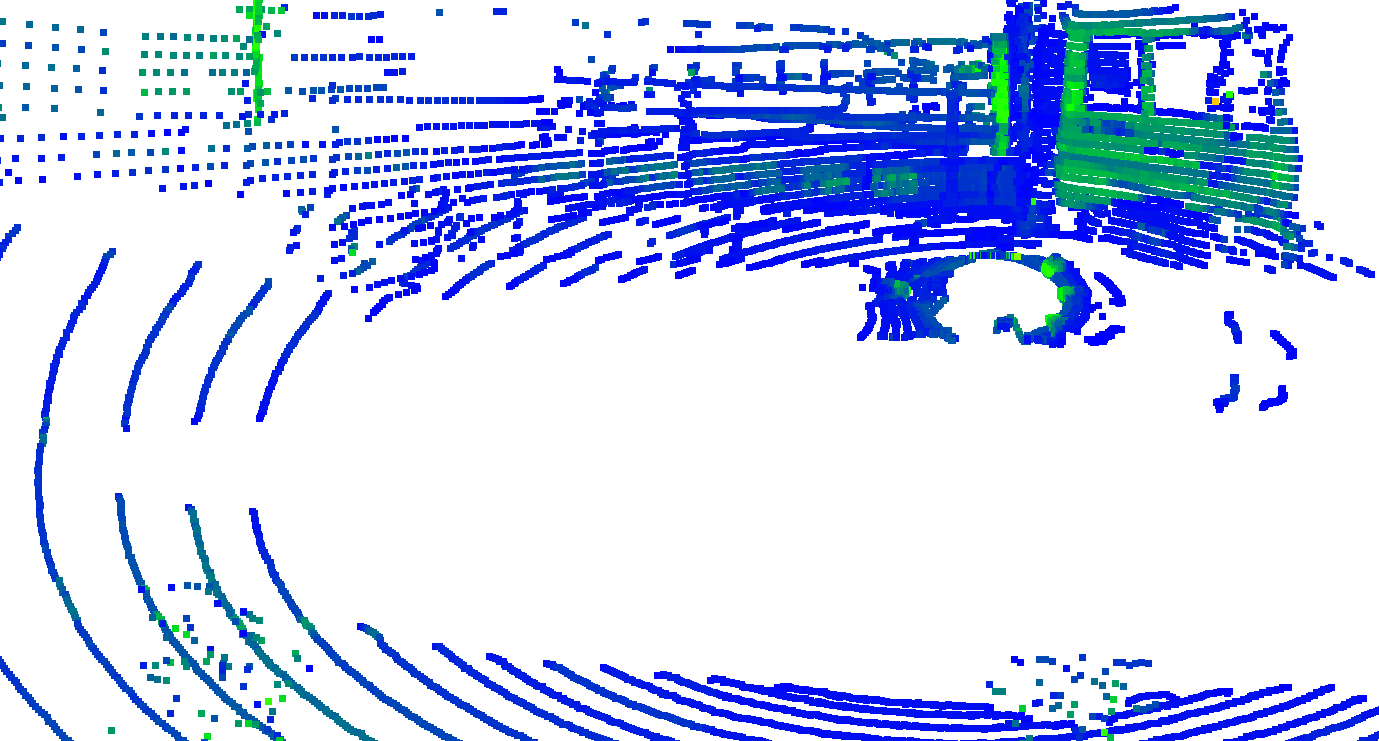
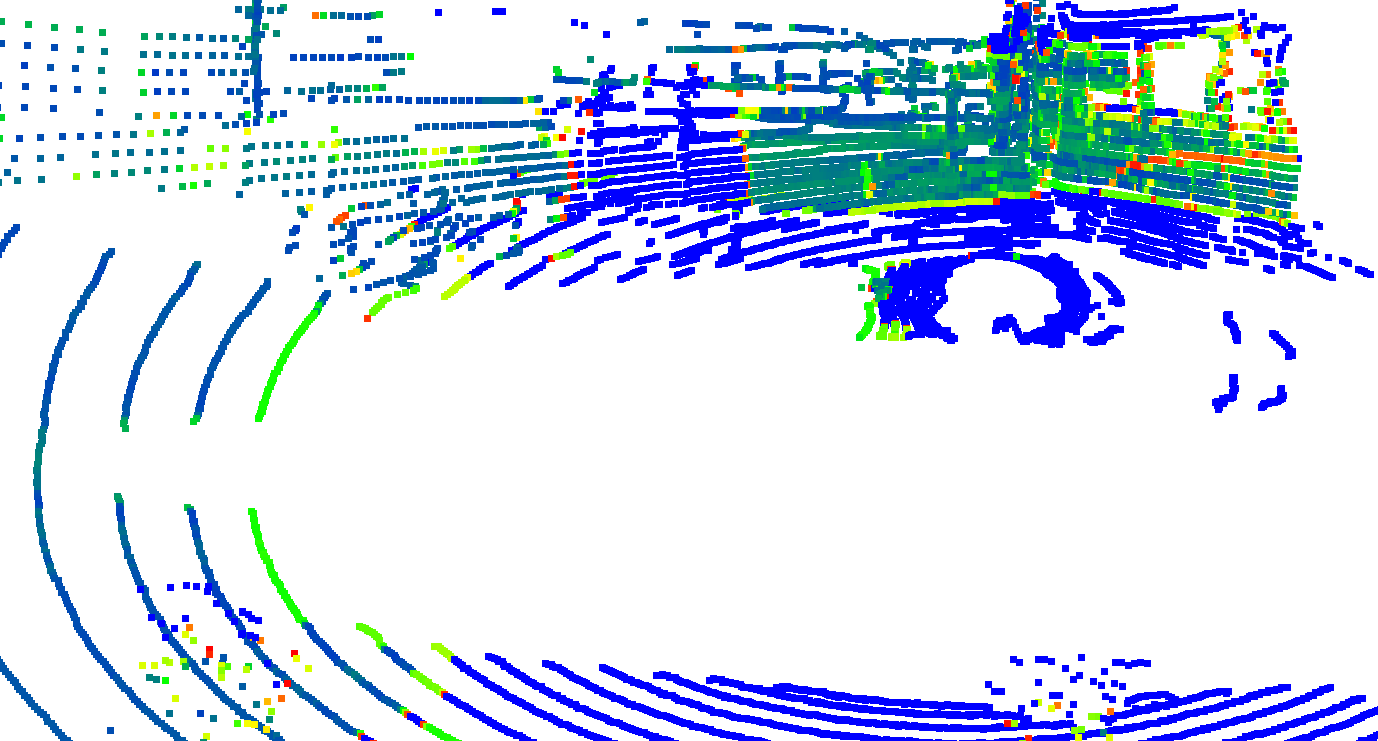
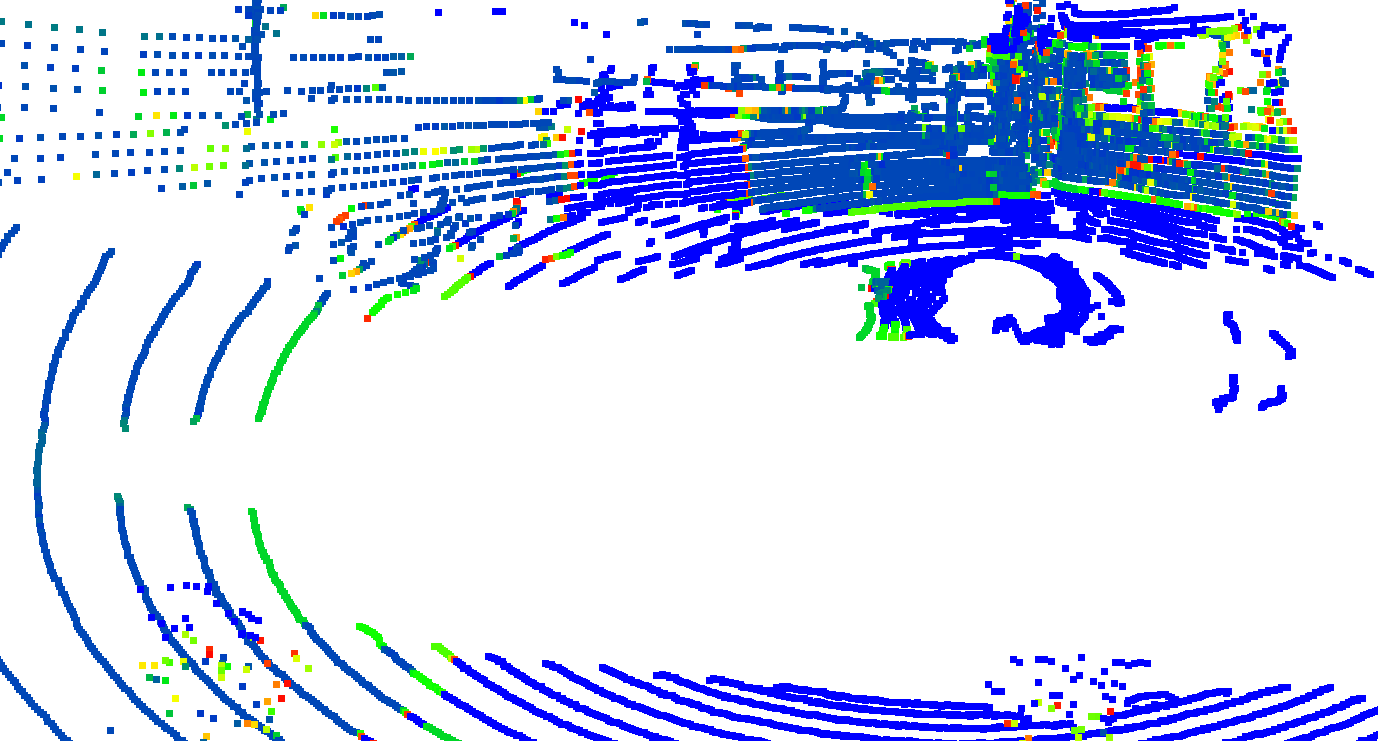
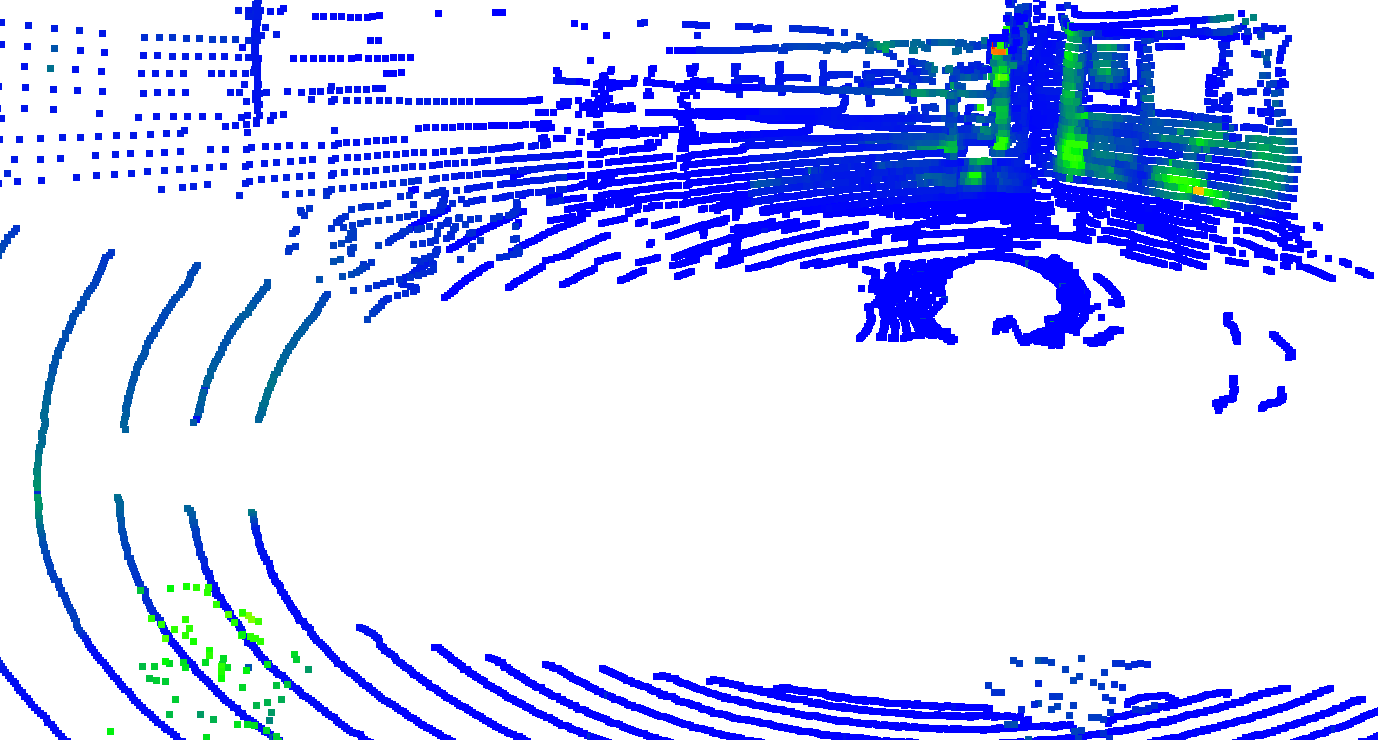
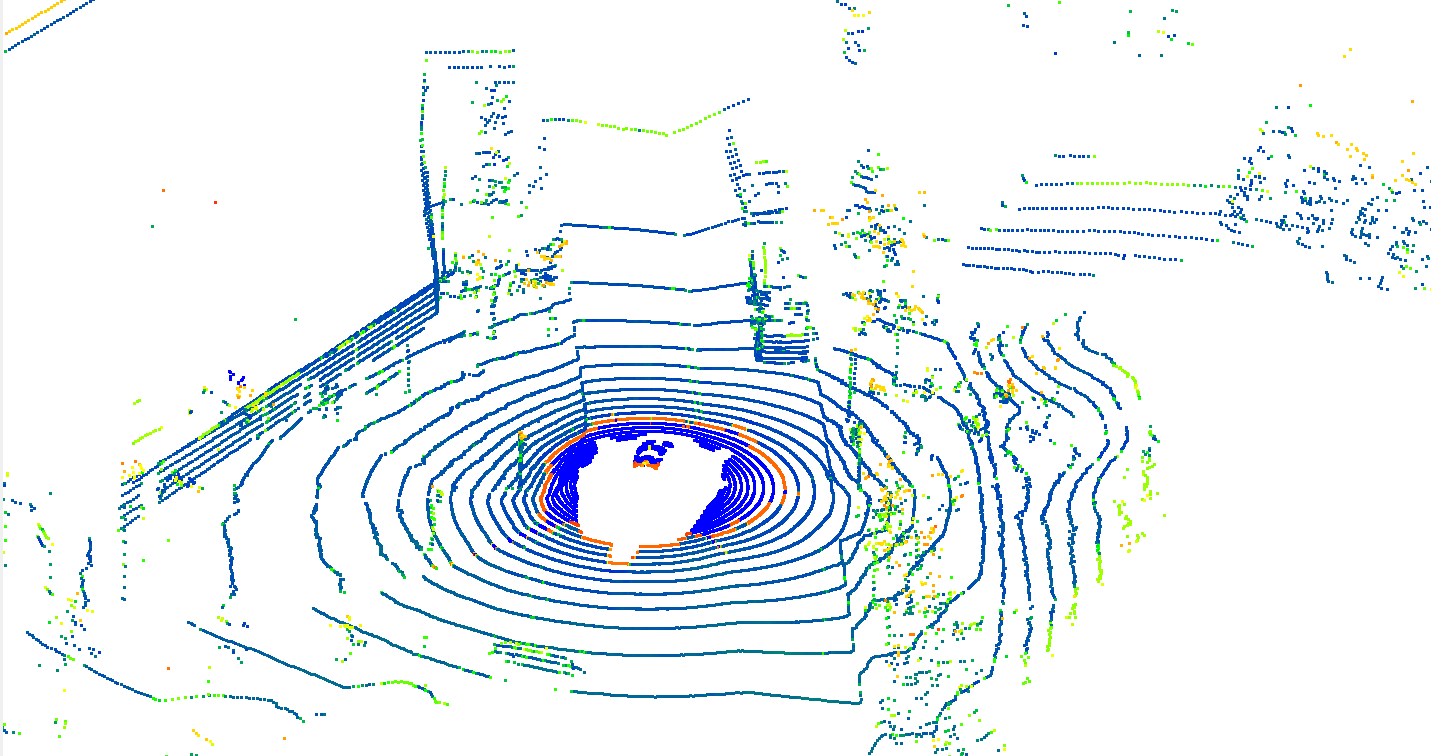
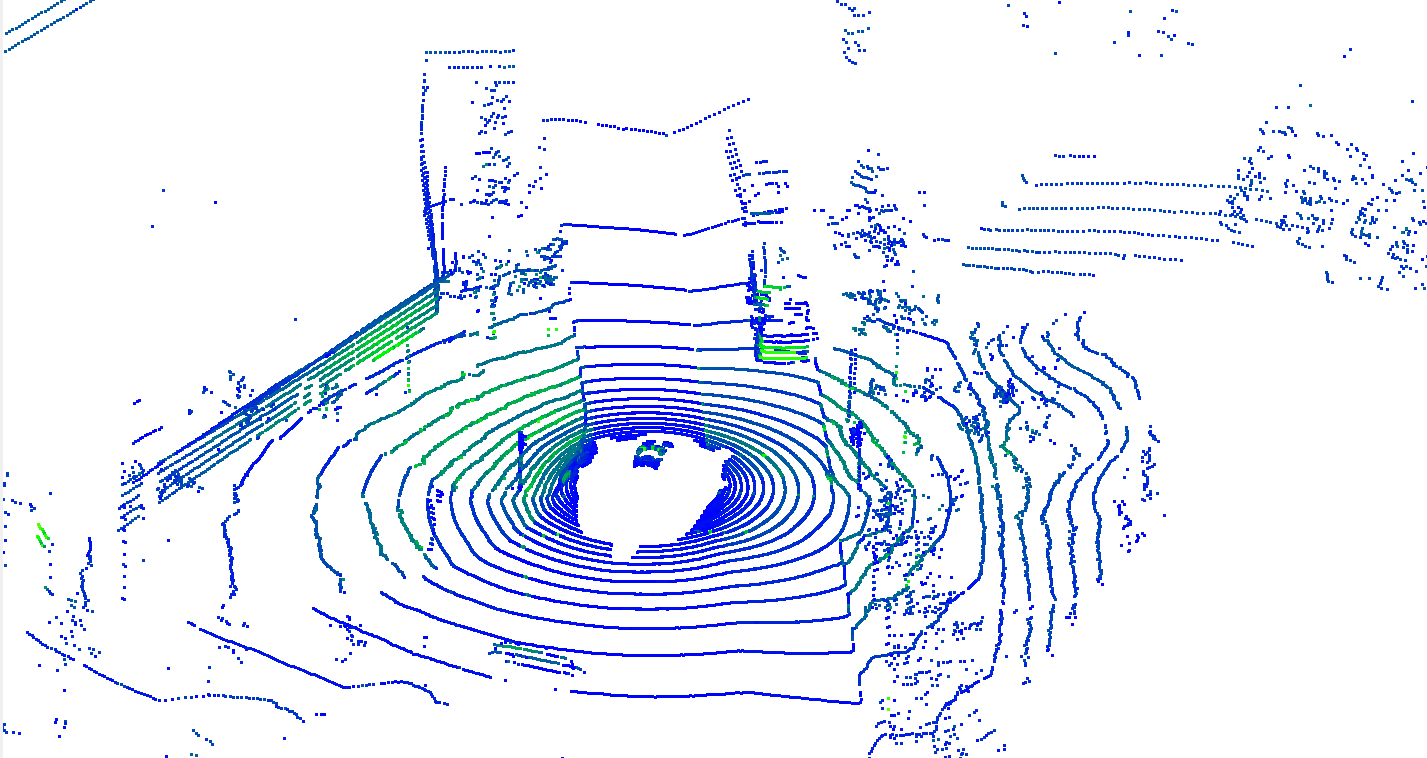
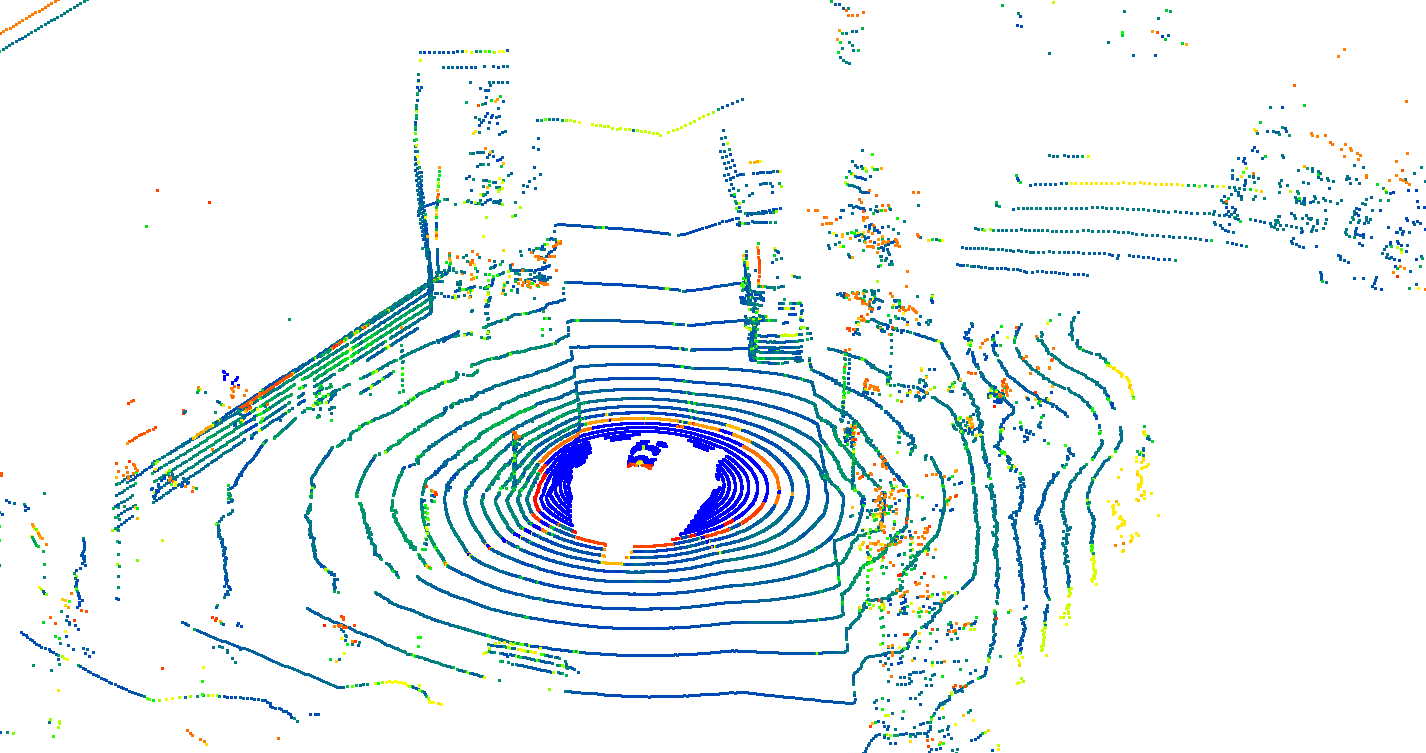
nuScenesWe compare to reconstruction‑based methods; point clouds are colorized by synthesized intensity to highlight visual differences. Importantly, NIDAR was not trained on the nuScenes dataset — these results demonstrate strong zero‑shot generalization. In these scenes, the baseline methods' point-cloud intensity differ notably from the GT, while NIDAR's intensity match the GT most closely.

 NVIDIA Isaac Sim
NVIDIA Isaac SimTo validate the practical utility of NIDAR-generated intensity, we evaluate its impact on downstream SLAM tasks in Isaac Sim. The results demonstrate that incorporating NIDAR intensity significantly improves localization accuracy and reduces trajectory drift compared to geometry-only approaches.
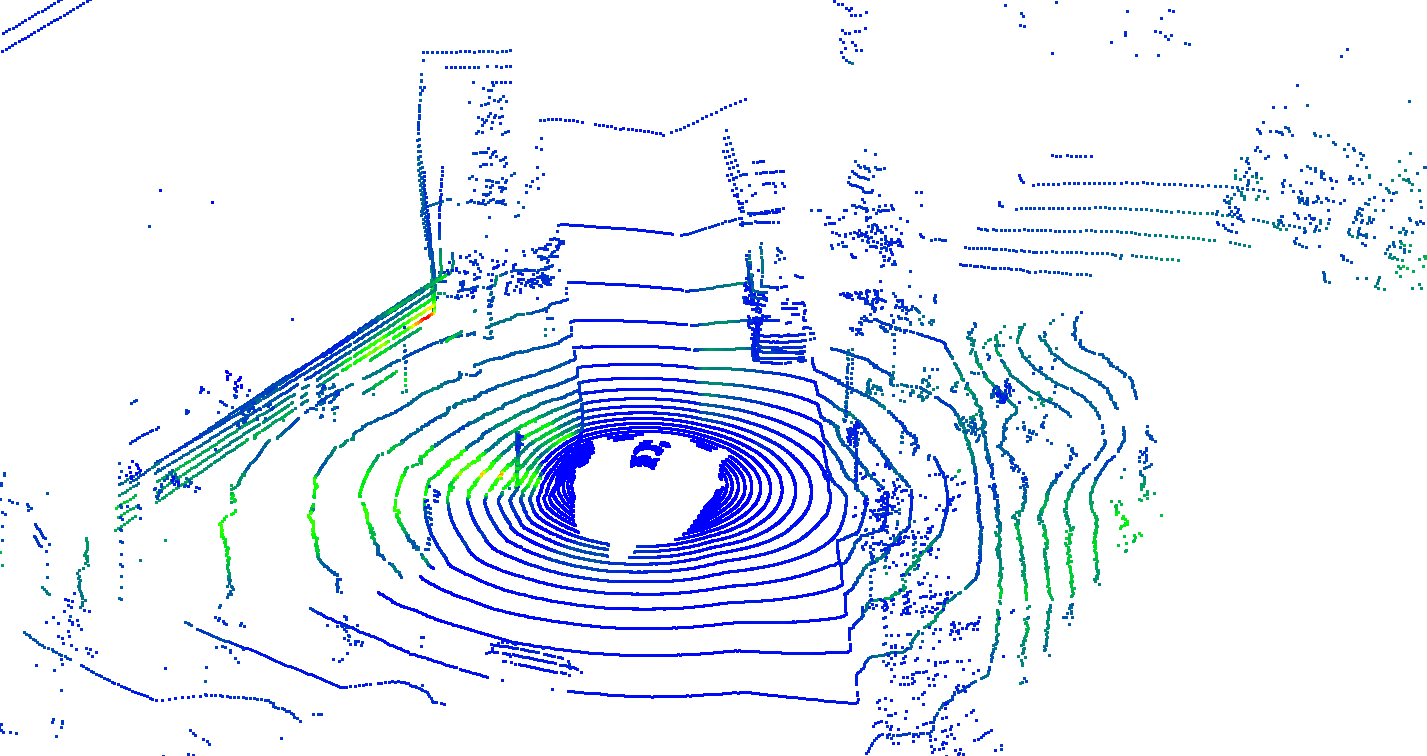
SLAM process visualization. Real-time mapping and localization with NIDAR-generated intensity in Isaac Sim.
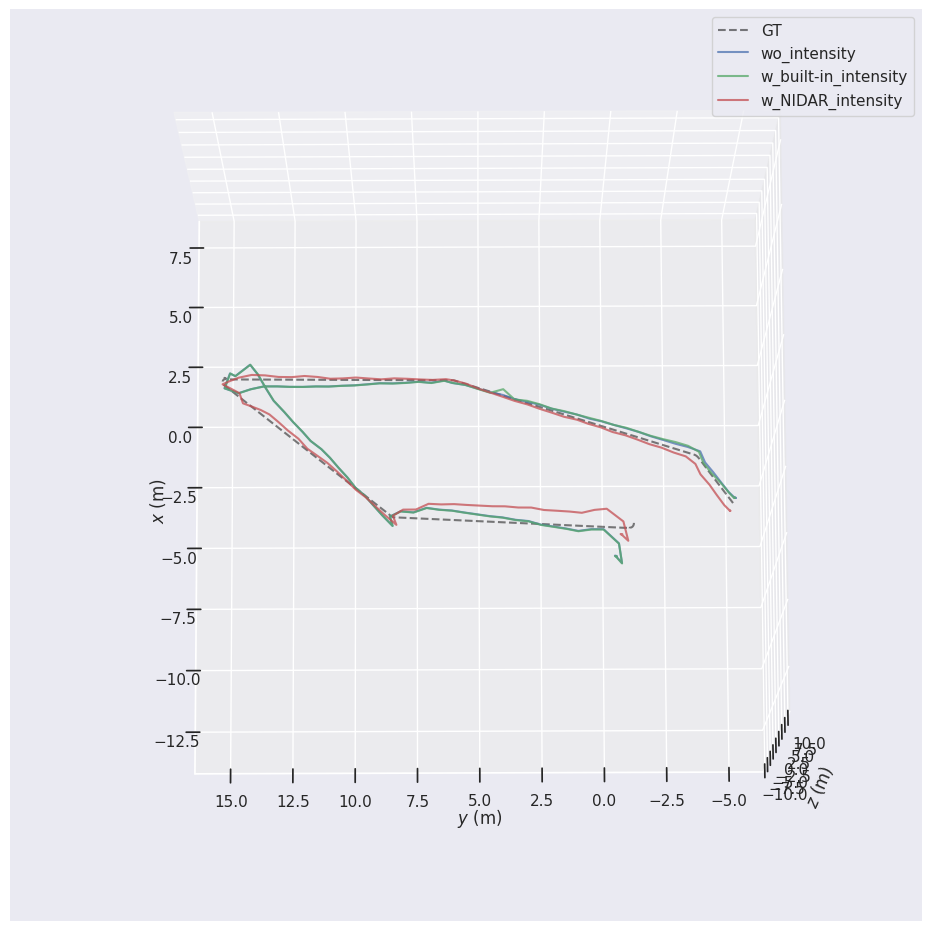
Trajectory evaluation. Trajectory visualization using the evo toolbox.
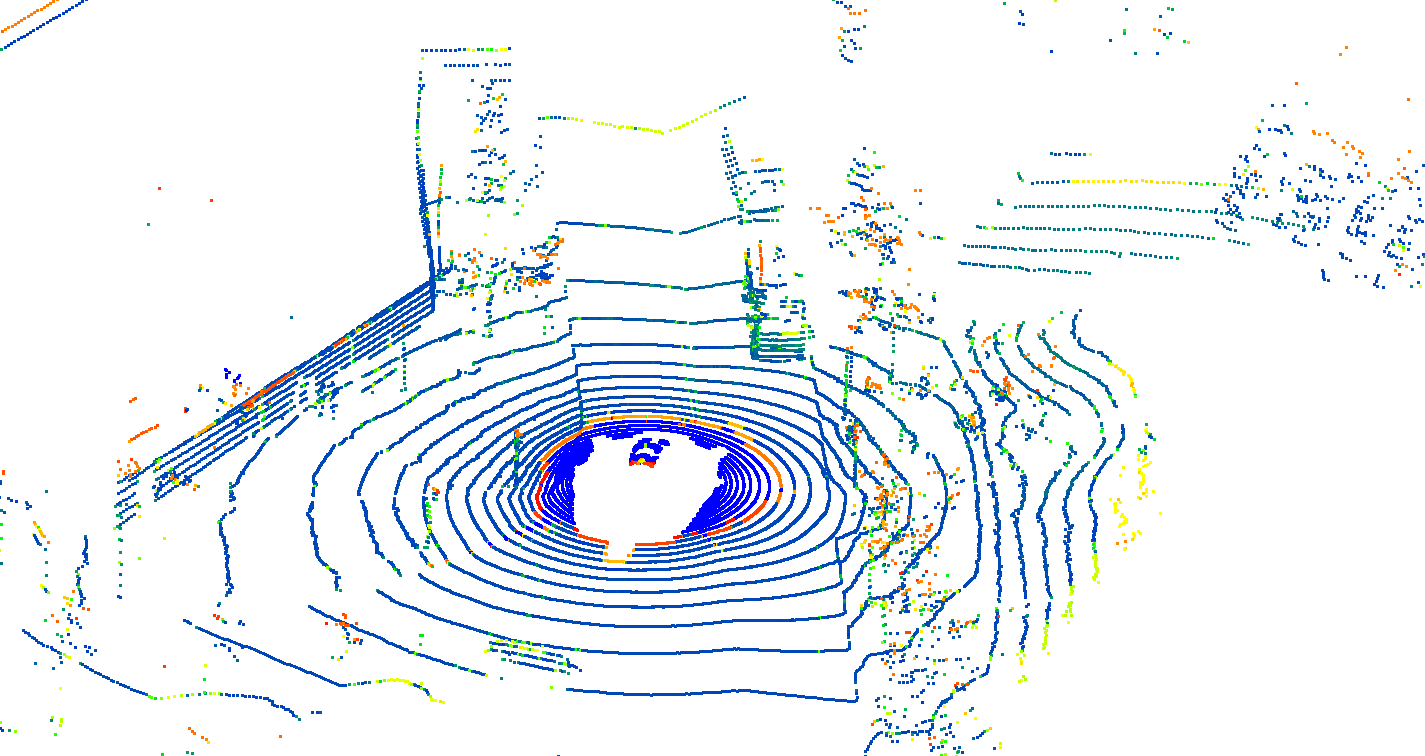
Model demonstration. Intensity-colored visualization of the NIDAR pipeline in Isaac Sim.
@inproceedings{anonymous2026nidar,
author = {Anonymous Authors},
title = {NIDAR: NIR-Guided Intrinsic Decomposition for Scalable Scene-Agnostic LiDAR Intensity Reconstruction},
booktitle = {IROS},
year = {2026},
}